 MeshLab(3d网格模型处理软件) 免费软件MeshLab(3d网格模型处理软件) 免费软件官方下载
MeshLab(3d网格模型处理软件) 免费软件MeshLab(3d网格模型处理软件) 免费软件官方下载
 iCan3视频编辑工具 v1.2.3.7
iCan3视频编辑工具 v1.2.3.7 淘宝查查v2.2
淘宝查查v2.2 Fort Firewall(免费防火墙) v3.5
Fort Firewall(免费防火墙) v3.5 HttpDdos(网站压力测试软件)v4.4
HttpDdos(网站压力测试软件)v4.4 PDF 免费软件
PDF 免费软件 联想v460显卡驱动 win7 64 v暂无
联想v460显卡驱动 win7 64 v暂无 未来教育计算机一级题库软件 免
未来教育计算机一级题库软件 免MeshLab中文版已经将软件的基本功能都进行了汉化,用户无需安装即可使用软件,可进行专业的3D设计及渲染等操作,支持多面编辑及多种文件格式输入输出,需要三维设计的用户快来下载吧。
MeshLab中文版是一款专为三维设计制作而设计开发的也页面简洁大方,功能丰富,适用范围广泛,操作逻辑简单易上手的,开源的,可扩展的三维几何处理系统,MeshLab中文版主要功能是帮助用户处理和编辑3D三角网格;它为用户提供丰富的功能模块,包括经常使用的编辑功能以及数据清理功能,支持对程序中出现的错误进行修复。
软件功能几何处理
我们的研究侧重于创建和操纵数字形状表示的概念和实用算法。
网格参数化
参数化通常被定义为二维域和嵌入在R 3中的双流形表面之间的双射映射。“好”参数化是建模和渲染技术的先决条件,如重新网格化,变形,纹理映射等。

稳健的场对齐全局参数化 提供了一种用于计算与给定交叉场对齐的局部双射全局参数化的稳健方法。

范围图像集的全局参数化允许全局参数化由范围图像表示的表面。与其他参数化技术相比,我们不是从歧管网格开始。构建这样的全局参数化只需要一种方法将表面数据投影到一组平面上,并且可以直接应用于隐式曲面,非流形曲面,非常大的网格和范围扫描的集合。

简单四线域 技术保持与输入中的交叉场对齐,同时获得由少数粗轴对齐的矩形块组成的参数域,这些块形成没有T形接头的抽象基础复合体。
造型
基于大量模式的交互式四边形方法,这些模式是从艺术家手动设计的模型中学习的。
特征对齐的T网格提出了一种构建由少量四边形块组成的补丁布局的方法,同时保持良好的特征对齐。为了实现这一点,我们使用四边形T网格,其中两个面的交点可能不是整个边缘或顶点,而是边缘的一部分
建筑几何
用于生成多边形网壳结构结构的框架,其拓扑结构设计为在静态性能方面表现优异。
MeshLab中文版有趣的功能:编辑,过滤器,装饰,这些功能在日常的“网格处理”生活中非常有用。
描述了通过删除不需要的几何体或属性来“清理”网格的方法。
软件特色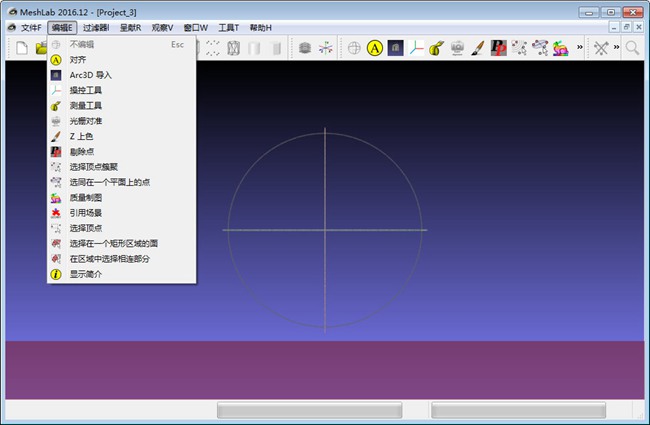
1、所有与颜色相关的滤镜都可以正确使用Alpha值。
2、各种帮助/描述文本的改进和拼写错误删除。
3、在SketchFab上直接上传模型。
4、基于2D / 3D对应的3D模型上的光栅配准。
5、在几乎所有过滤器上修复错误。
6、MeshLab中文版用于各种学术和研究环境,如微生物学、文化遗产及表面重建等。
软件亮点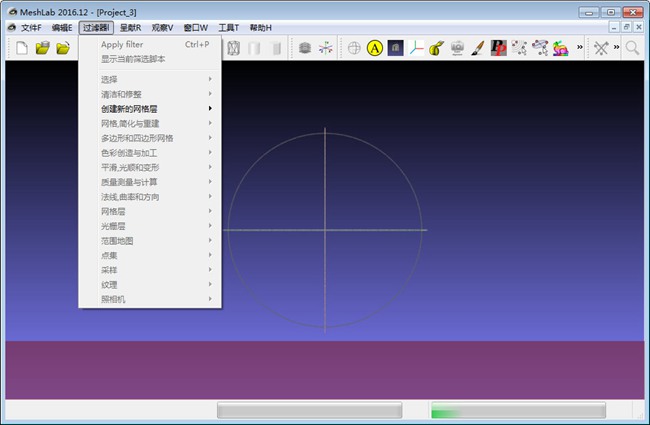
互动选择和删除的部分 网。 即使对于大型模型。
画界面选择、平滑和着色网格。
输入/输出 许多格式:
进口: 厚度、STL,OBJ,3 ds,COLLADA,PTX,V3D,PTS,摘要,XYZ,GTS,三,ASC,X3D,X3DV,VRML,ALN
出口: 厚度、STL,OBJ,3 ds,COLLADA,VRML,DXF,GTS,U3D,IDTF X3D
点云的支持。 现在只有点是由3 d文件支持在厚度和OBJ格式。
U3D 支持;MeshLab中文版是第一个开源工具提供的直接转换3 d网格为U3D格式。 现在您可以创建pdf,喜欢 这 与3 d对象只是MeshLab中文版和乳胶。
网清洁过滤器:
删除重复的,未引用的顶点,null 脸
删除小隔离组件
连贯的正常的统一和翻转
消除非流形的面孔
自动填充的洞
再啮合过滤器:
高质量的边折叠简化(即使纹理坐标保存)
表面重建点(一个球旋转变体,行进中的多维数据集和泊松重建)
细分表面(循环和蝴蝶)
功能保持平滑和整流罩过滤器
洞填满
各种各样的彩色化/检验过滤器:
高斯和平均曲率
边界边,测地距离,从边界
非two-manifold边缘和顶点
自相交的脸
环境闭塞。 环境闭塞的字段可以计算每个顶点和存储
互动网绘画:
颜色绘画
选择油漆
平滑
测量工具。 你可以把线性显示网格点之间的措施
切片工具。 一个新工具,允许出口平面部分网格的SVG格式
3d扫描工具:
对齐基于ICP范围地图校准工具,将空间网格到相同的参考。
合并多个泊松表面网格重建源代码(请提供由迈克尔·Kazhdan和马太福音Bolitho)已经包含在。
基于OpenGL材质的渲染(写你自己的 材质!)兼容台风实验室的材质设计师
大型渲染(16 k x 16 k)高质量的印刷
所有执行清洁/编辑的历史 行动可以重放期间在不同的网格或保存和归档 目的。
可伸长的插件的基础架构,编写新的 网格处理函数,着色筛选器和不同的文件
软件优势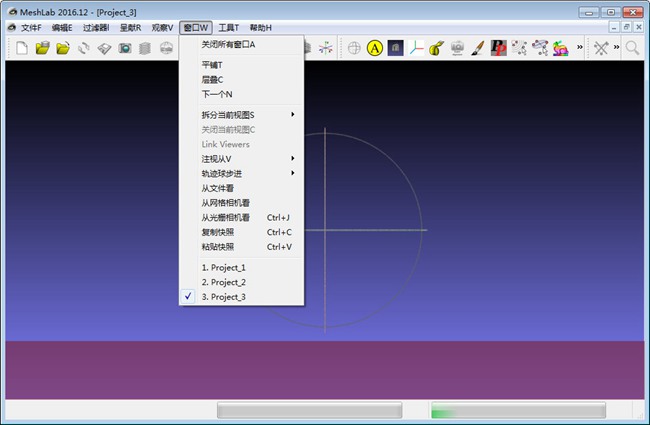
1、MeshLab中文版内部渲染系统的总重写。巨大的渲染速度!
2、MeshLab中文版屏蔽泊松表面重建更新到最新版本。
3、新的转换过滤器。
4、从您的模型中获取指标信息的新方法。
5、转换矩阵现在在滤波器中更均匀地使用。
6、支持输入/输出的文件格式有:STL、OBJ、3D动画、VRML2.0、U3D、X3D、COLLADA
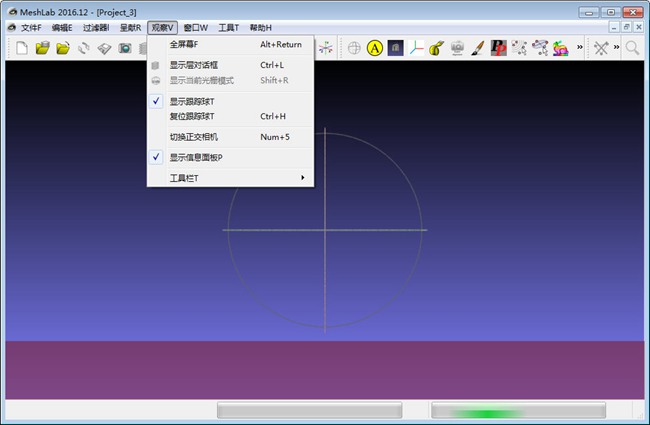
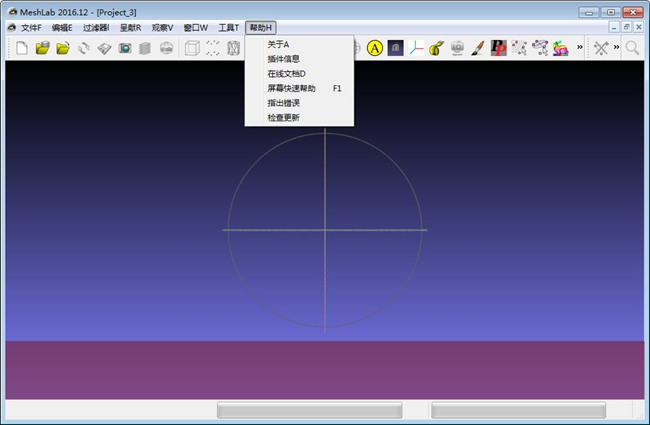
怎么显示坐标方法一:
1.我们点击上面栏目中的呈现选项,在出现的弹窗中我们可以选择显示坐标轴。
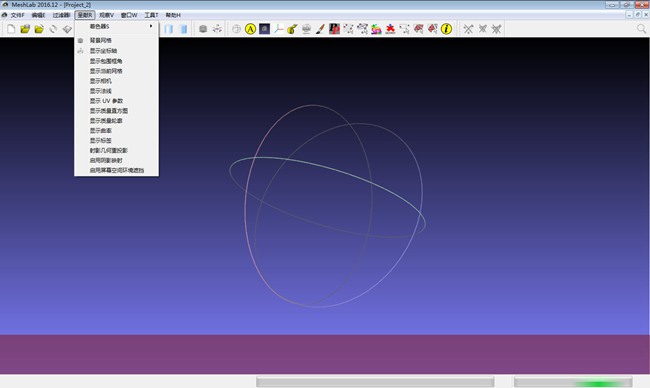
2.这个时候就可以发现,栏目中的选项已经被激活了,只不过小编没有导入具体的项目所以没有显示出来。
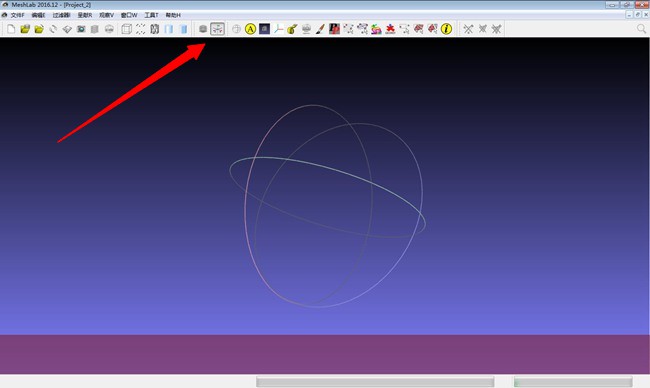
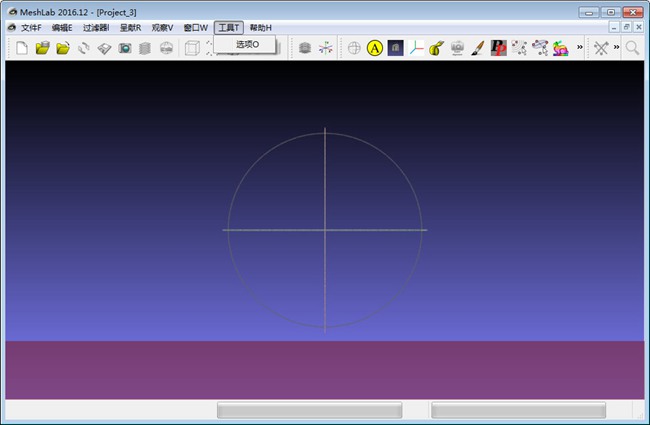
方法二:
我们直接点击上面的坐标轴选项,也可以直接显示出坐标信息。
其实打开txt格式的文件非常简单,但是主要因为大家可能看不懂英文版本的软件,所以导致使用起来有障碍,下面的meshlab中文版就一目了然了,来了解下吧。
1.我们打开文件选项之后,点击导入网格这个选项。
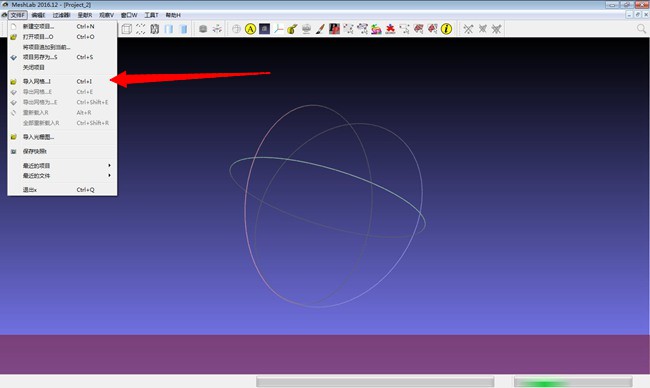
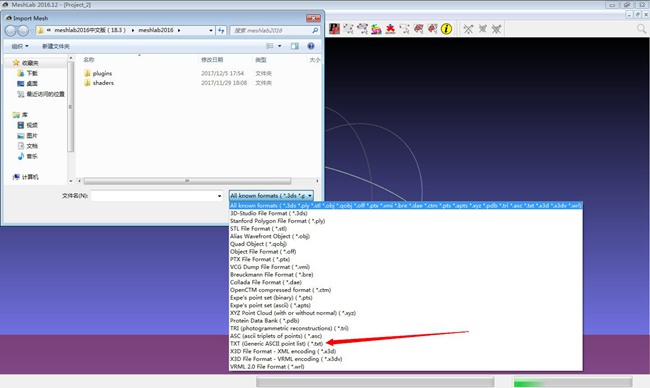
2.在弹出的窗口之中我们选择不同的文件格式。
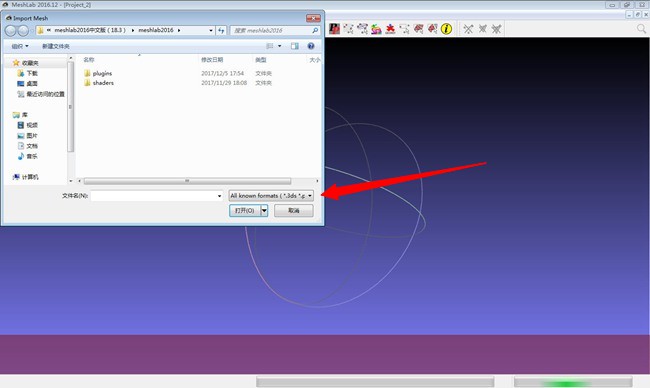
3.这个时候我们就会发现有txt格式的文件,然后用户选择指定的文本即可导入其中打开了。
对于大部分的用户而言可能都是第一次接触meshlab这款软件,对其基本的操作并不清楚,比如说网格化、点云代替及参数化等各种操作还不了解,下面就讲解一些使用频率较高的操作步骤,用户浏览之后就会明白了。
1.打开bundle.rd.out 文件 :
a. 点击按钮1,打开由 VisualSFM生成的存储在xx.nvm.cmvs文件夹下的 bundle.rd.out 文件。随后会询问是否选择照片列表文件,选择同文件夹下的 “list.txt”即可。这一步会把相机及对应的照片导入进来,对后续的纹理处理至关重要。
b. 点击按纽2,打开显示层目录,检测相机载入是否正确, Render –> Show Camera,因可视化相机的尺寸比网格尺寸大得多,所以需调整相机的缩放因子,scale factor可以从0.001开始调小,直到相机位置清晰可见。
2.稠密点云代替稀疏点云:
a. 点击按钮3,隐藏可视的稀疏点云;
b. File –> Import Mesh加载稠密点云(xx/00/models/option-0000.ply);VisualSFM生成多个.ply文件时,需合并成一个mesh。在载入的任何一个.ply上右键选“Flatter Visible Layers”。
3. 清除杂点:
按钮4选中杂点区,按钮5删除之。
4.网格化:
Filter –> Point Set–> Surface Reconstruction: Poisson.
参数可调, Octree Depth:控制着网格的细节,此值越大细节越丰富但占内存越大运行起来慢,一般设10,可慢慢调大。
利用Poisson Surface Reconstruction算法由稠密点云生成多边形网格表面。 ,Poisson表面重建算法会生成一个“不漏水”气泡,把所有场景对象包裹在其中。即模型是封闭的。可以移除多余的面Filters –> Selection –> Select faces with edges longer than,而后删除。
5.修复流形边缘:
后续的纹理处理要求网格化的模型必须是流形(MANIFOLD)的,因此需删除非流形边(简单讲就是任何由多面共享的边)。Filters –> Selection –> Select Non-Manifold edges,而后删除之。
6.参数化:
Filter –> Texture –> Parameterization from registered rasters。
根据相机投影关系创建UV映射。
7.纹理投影:
Filter –> Texture –> Project active rasters color to current mesh, filling the texture。
可设置任意分辨率(512的2的二次方倍:512 / 1024 / 2048 / 4096 / 8192…)的纹理图。
6和7可以合为一步: Filter –> Texturing –> Parameterization + texturing from registered rasters.
8.完成导出:
当你调整满意了之后,File –> Save mesh as… a .obj文件。即可便有了一个包含你选定分辨率纹理的obj文件。
添加了诸多功能
同类软件精选
用户最爱